May 16,2014
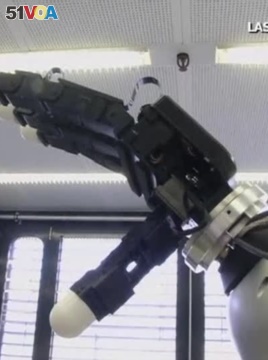
An international team of engineers based in Switzerland built a robotic arm that learned to perform complex movements.
The term "robotic arm" covers a variety of mechanical devices — from robots that weld automotive chassis to emotely controlled cranes on the International Space Station. In between are artificial arms developed for humanoid robots or people who have lost limbs.
Developed at the Federal Polytechnic School of Lausanne, the device, built in cooperation with robotic manufacturer Simlab, is even capable of grabbing flying objects.
According to researcher Seungsu Kim, the arm's processor takes only milliseconds to calculate three primary parameters.
"First thing is to predict the whole trajectory," said Kim. "Second is finding the best catching posture, and third is generation of arm motion.
But what most of us know how to do instinctively, the robotic arm had to learn from scratch.
While catching a tennis racquet is easy compared to catching, say, a half-empty bottle of water with liquid sloshing in flight, unpredictably changing its trajectory, researcher Ashwini Shukla says different objects were thrown in its direction many times until the processor learned to compare and predict flight patterns.
“We teach the robot how to reach towards an object from many different directions, and from that same time we teach it the coordination it needs to have between the arm and the fingers to be able to successfully catch the object," said Shukla.
The team's leader, Professor Aude Billard, is especially proud of their achievement.
"This capacity to predict accurately very complex trajectory of what we call the grasping point, which is non-linear ... that is the major scientific advance," said Billard.
Researchers hope their robotic arm may someday be used to grab and retrieve fast moving and rotating space debris, whose rapdily increasing abundance threatens other functioning objects, including the International Space Station.